-
Notifications
You must be signed in to change notification settings - Fork 19
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
docs: add the usage of realsense camera in ros2go
- Loading branch information
Showing
2 changed files
with
78 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,77 @@ | ||
| # Intel Realsense 相机 | ||
|
|
||
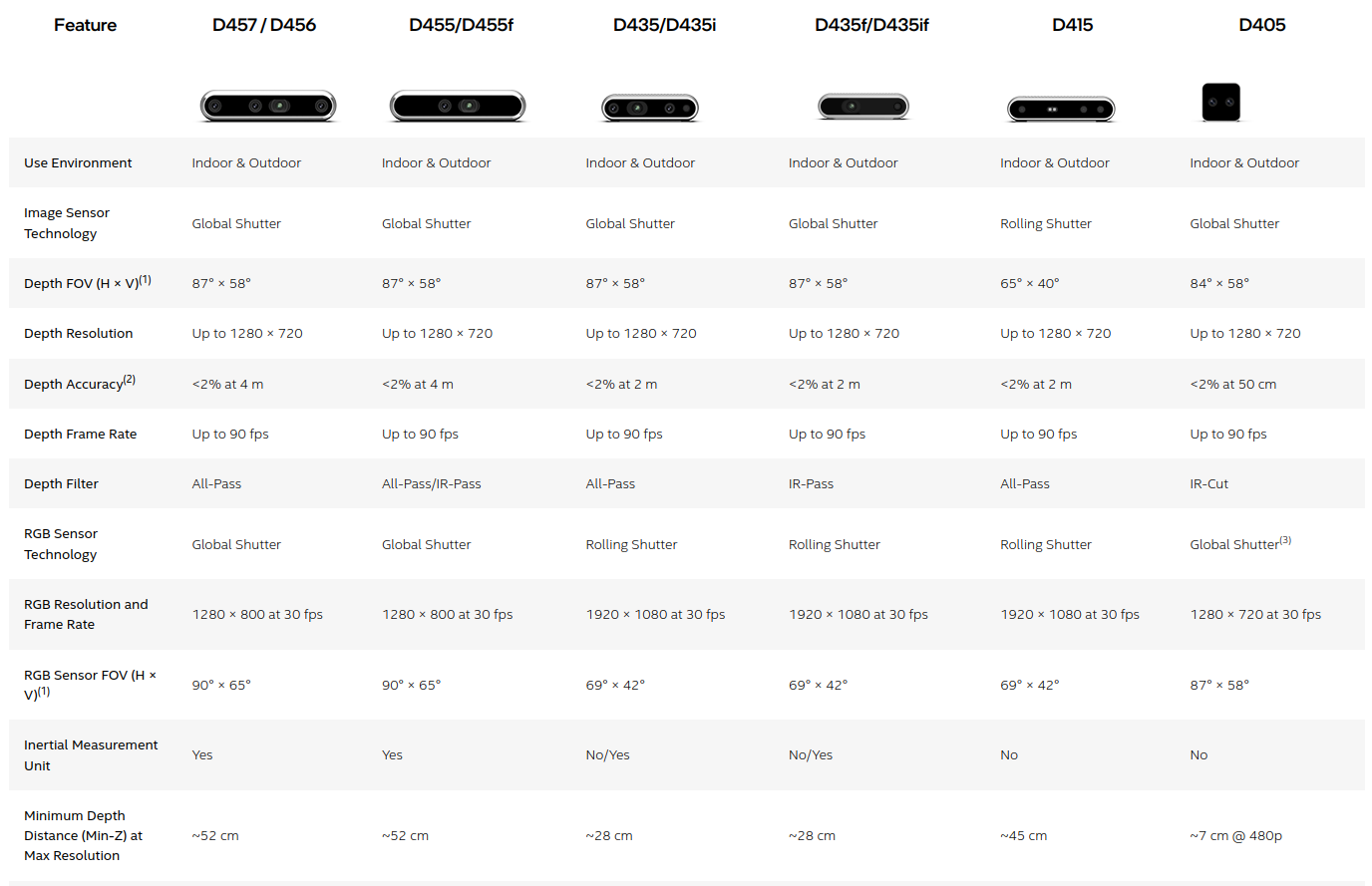
| RealSense 相机是由英特尔公司开发的深度感知相机,它能够捕捉三维空间信息,并生成深度图、点云图等数据。与传统的 RGB 相机相比,RealSense 相机具有以下优势: | ||
|
|
||
|  | ||
|
|
||
| - 能够感知深度信息:RealSense 相机可以捕捉物体与相机的距离信息,从而生成深度图和点云图,实现三维空间感知。 | ||
| - 具有较高的精度:RealSense 相机可以提供亚毫米级的深度精度,能够精确测量物体的距离和尺寸。 | ||
| - 具有较强的鲁棒性:RealSense 相机能够在不同光照条件下工作,并且能够抵抗环境噪声的影响。 | ||
|
|
||
| ## 在 ROS2GO 中如何驱动 | ||
|
|
||
| > **1、运行启动文件** | ||
| ::: code-group | ||
|
|
||
| ```sh [ROS1] | ||
| roslaunch realsense2_camera rs_camera.launch | ||
| ``` | ||
|
|
||
| ```sh [ROS2] | ||
| ros2 launch realsense2_camera rs_launch.py | ||
| ``` | ||
| ::: | ||
|
|
||
| > **2、查看话题** | ||
| ::: code-group | ||
|
|
||
| ```sh [ROS1] | ||
| rostopic list | ||
| ``` | ||
|
|
||
| ```sh [ROS2] | ||
| ros2 topic list | ||
| ``` | ||
| ::: | ||
|
|
||
| 启动后查看到有如下话题,则可以利用 RViz 或者 rqt_image_view 等工具订阅这些 Topic,就可以显示相应的数据。 | ||
|
|
||
| ```shell | ||
| /camera/color/image_raw (RGB image) | ||
| /camera/depth/image_rect_raw (depth image) | ||
| /camera/infra1/image_rect_raw (left infrared image) | ||
| /camera/infra2/image_rect_raw (right infrared image) | ||
| /camera/imu (imu, only for D435i and above) | ||
| ....... | ||
| ``` | ||
|
|
||
| > **2、使用 RVIZ 查看数据** | ||
| ::: code-group | ||
| ```sh [ROS1] | ||
| rviz | ||
| ``` | ||
|
|
||
| ```sh [ROS2] | ||
| rviz2 | ||
| ``` | ||
| ::: | ||
|
|
||
| > **3、或者使用 rqt_image_view 查看数据** | ||
| ::: code-group | ||
| ```sh [ROS1] | ||
| rqt | ||
| ``` | ||
|
|
||
| ```sh [ROS2] | ||
| rqt | ||
| ``` | ||
| ::: | ||
|
|
||
| ## 参考资料 | ||
|
|
||
| - [realsense-ros](https://github.com/IntelRealSense/realsense-ros) | ||
| - [Intel RealSense D435i:简介、安装与使用 (ROS、Python)](https://zhaoxuhui.top/blog/2020/09/09/intel-realsense-d435i-installation-and-use.html) |