这是我硕士毕业论文提出的一个SLAM框架,它紧耦合了2D激光雷达、IMU和轮式里程计的数据。
除此之外,也为了室内移动机器人这个场景做了很多特殊的处理:
- 地面约束
- 一些基本的假设,例如roll和pitch很小之类的
- 基于2D激光雷达的回环检测
绝大部分的工作都集中在前端部分的设计和实现
后端部分使用位姿图,唯一创新的地方在于改进了之前的研一发表的论文《基于全局特征点匹配的全局定位方法》所提出的重定位算法,将之应用于回环检测。
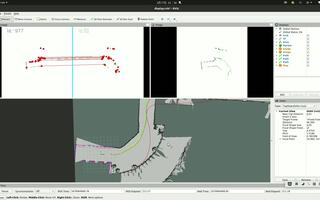

这两个的建图效果有点差,主要是因为外参数没有标定的很准

数据集地址:OpenLORIS-Scene Datasets
PS:记得用它官方的工具把IMU数据合并一下。
cd ${yourworkspace}/src
git clone https://github.com/LittleDang/2DLIW-SLAM
cd ../..
catkin_make -j- 找到docker/下的dockerfile,构建镜像和容器
- 把本项目挂载进去
- 和1一样。-
为啥配置文件里面有一些参数似乎没有意义,例如
enable_camera之类的?因为开发的过程中项目经历了比较多次的调整,有一些功能是暂时放弃了,但是一开始的代码接口还保留着,后续可能继续开发。
这些不需要的参数保持默认值即可。
-
为什么系统的坐标系选择了IMU?
一开始没有考虑清楚就开始写这个项目了,后来发现这属实会带来一些不太方便的地方,例如大量的地方的处理都不是在IMU坐标系上的,再来一次应该会选择使用base_link作为系统的坐标系。
-
为啥仓库叫做2DLIW-SLAM,而代码里面都是叫做LVIO-2D
因为我一开始只想做一个前端,没想着做后端,但是后来为了系统的完整和毕业论文的完整,我添加了后端部分。
-
外参怎么获得?
我也没有特别好的方法,有一些是传感器自带的,有一些是通过在有监督的情况下,通过一些比较曲折的方式标定的,总的来说精度没有很高,这也导致了系统在某些情况下误差会比较大。(虽然很重要,但是数据集外参已经有了以及外参的标定不是本论文的重点,所以也没有仔细研究)
-
论文在哪?
这个等我毕业答辩完吧~,目前只有回环相关检测的论文是发表了的。
-
从大三开始第一次接触SLAM,到现在硕士毕业,一直想着从零自己写一个SLAM框架,想要在毕业之前完成这件事情,同时也算是留个纪念,毕竟读研期间也没作出大的成果。
-
在阅读了VINS-MONO、Cartographer、LIO-SAM等优秀的开源项目的代码之后(前两个框架对我影响可太大了哈,感谢这些作者的奉献,我也想开源hhh),我也逐渐萌生了写一个框架按照我自己的理解去实现我想要的功能,遂有了将这个构思已久的SLAM框架作为我硕士毕业设计的准备(可以说是先想做这个框架,再顺便写的毕业论文)。
-
在实现的过程中也经历过很多很多的问题,最大的一个便是,一开始是还准备融合单目相机的,但是后续主要由于工作量的考虑,在项目进行到一半的时候,我放弃了单目相机(工作量对我一个人来说实在太大了,我那时候很怕不能按时完成。。),可以看到我代码里面很多设计一开始还是考虑着相机这个传感器的。以后有机会或许会考虑完善它,让它进化成2DLVIW-SLAM
-
当然在代码实现方面、理论方面可能比较稚嫩甚至错误,如果发现了,欢迎和我讨论,我很乐于接受修改意见。
-
最后,求职中。。。
Email: brucedang2022@163.com