crank link simulator
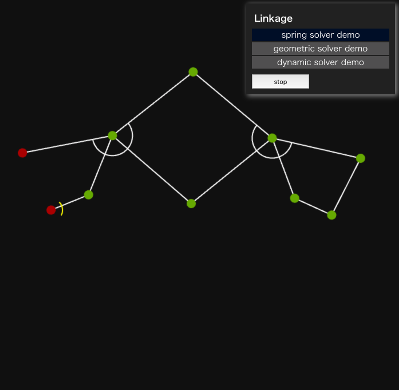
build a spring model and compute equilibrium condition
solve geometrically
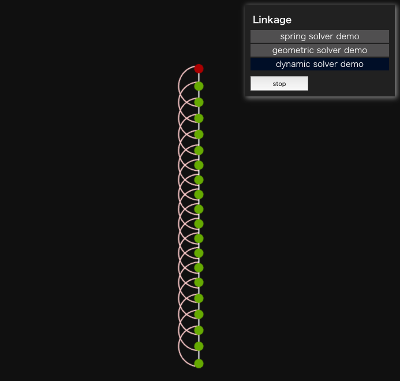
simulate mechanically with verlet method
import Linkage from "./src/linkage.js";
var scene = new Linkage.Scene( Linkage.SpringSolver );
//var scene = new Linkage.Scene( Linkage.TriangleSolver );
//var scene = new Linkage.Scene( Linkage.DynamicSolver );
// enable gravity
scene.setGravity(true);
var dom = scene.initCanvas(innerWidth, innerHeight, /* scale = */ 100.0);
document.body.appendChild(dom);
/*
* create point
*/
var point0 = new Linkage.Point( [-2,0], /* fixed = */ true);
var point1 = new Linkage.Point( [0,0], /* fixed = */ true);
var point2 = new Linkage.Point( [2,0] );
var point3 = new Linkage.Point( [0,2] );
scene.addPoint( point0 );
scene.addPoint( point1 );
scene.addPoint( point2 );
scene.addPoint( point3 );
/*
* create constraint
*/
var linear1 = new Linkage.Constraints.Linear( point2, point3 );
var linear2 = new Linkage.Constraints.Linear( point3, point1 );
var linear3 = new Linkage.Constraints.Linear( point1, point2 );
scene.addConstraint( linear1 );
scene.addConstraint( linear2 );
scene.addConstraint( linear3 );
/*
* constrol constraint
*/
var control = new Linkage.Constraints.Rotational(point0, point1, point2);
scene.addConstraint( control );
console.log( `dof is ${scene.getDof()}`);
scene.solver.build();
var $button = $("#start-stop");
var state = "start";
function animate(){
requestAnimationFrame( animate );
control.setTarget( control.target + Math.PI/500.0 ) ;
scene.solve();
scene.render();
}
animate();