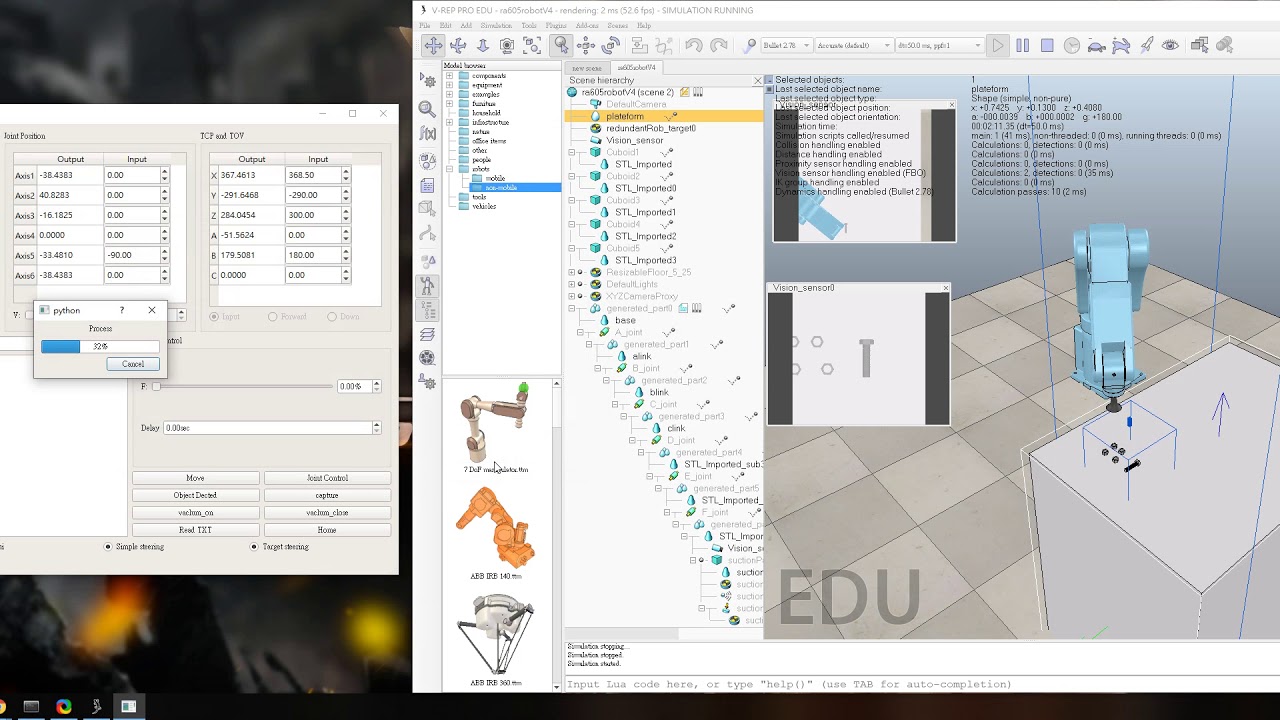
This project uses a self-made controller to communicate with the virtual six-axis robotic arm in vrep via remoteAPI.This project includes the following.
- Motor velocity planning
- Interpolator
- Controller Design
{kind=link}
{kind=link}
- opencv-python
- remoteAPI
- PyQt5
- Numpy
pip install -r requiment.txt