{kind=link}
This code is only compatible with "Firmware version 2" XV 11 Lidar.
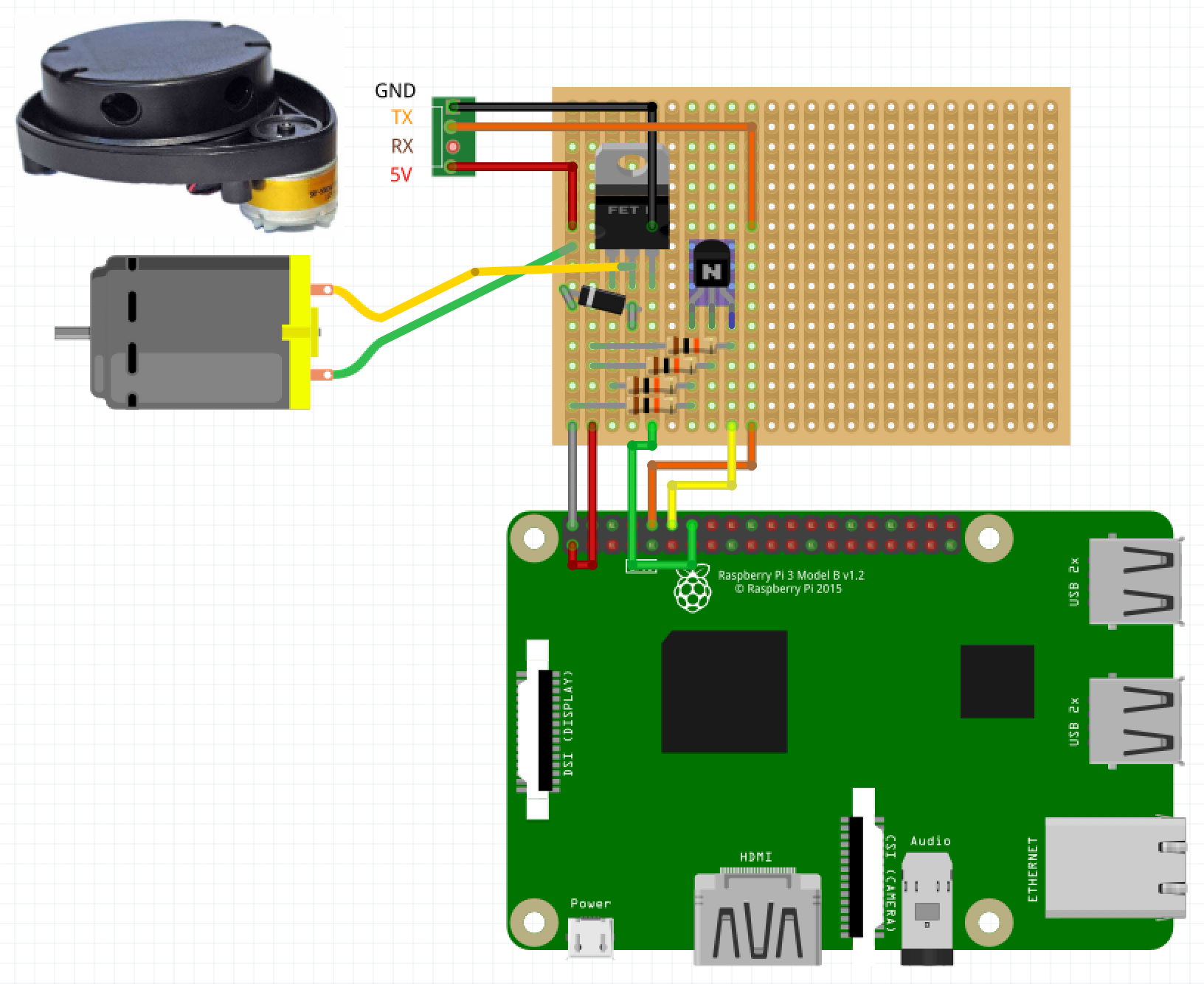
The LIDAR is connected to the serial port of the raspberry (3,3V / 8N1 / 115220).
A PWM is generated on pin 12 (GPIO18) and the program use a simple proportionnal controller to regulate the rotational velocity at 300 RPM.
LIDAR is connected to the Rasberry using the miniuart interface. To activate miniuart, edit "/boot/firmware/config.txt" and add or update the following lines :
enable_uart=1
core_freq = 250
dtoverlay=pi3-miniuart-bt
Then edit "/boot/firmware/cmdline.txt" and remove the following part :
console=*,115200
Then allow the user to use the uart interface :
USER=`whoami`
sudo usermod -a -G dialout $USER
sudo systemctl disable hciuart
sudo rebootLidar motor is controlled via a PWM on GPIO18 (pin number 12). We need to allow the user to control this pin. For that, a service script will be used that will also turn lidar off at startup :
sudo cp xv_11_lidar_raspberry/cfg/lidar /etc/init.d/
sudo chmod +x /etc/init.d/lidar
sudo update-rc.d lidar defaultsDo reboot to test :
sudo rebootIf everything is OK, lidar could be turned on and off using the following command lines :
lidar start
lidar stopWhen started, lidar data should be received on /dev/ttyAMA0. To check that, screen is used :
screen /dev/ttyAMA0 115200To exit GNU screen, type Control-A k.
OK, everything is fine, let's use ROS.
Start the ROS node :
roscore &
rosrun xv_11_lidar_raspberry xv_11_lidar_raspberry &Start lidar using ROS :
rostopic pub /lidar_active std_msgs/Bool "data: true"Stop lidar using ROS :
rostopic pub /lidar_active std_msgs/Bool "data: true"Show lidar data :
rostopic echo /scan
rosrun rviz rvizIn RVIZ, load cfg/demo.rviz