This HACS integration is used to address GPIO (especially and only -tested for RaspberryPi) using libgpiod and python gpiod >=v2.02 since -RPI.gpio is no longer supported. I created this for my own use, and to -learn how to build a custom integration, but since it is working on -Raspberry Pi feel free to use.
---💡 The code of this -custom component upto v1.4.5 is copied over to the original HACS RPI_GPIO gpio -integration. You should most likely check and use that integration -instead of this one. I'm keeping this repository for my own fun and -use.
-
--⚠️ This is working in -my homeassistant environment. Shared for testing. Use at your own risk. -👍
-
ha_gpiod is based on ha-rpi_gpio, which was
-already adapted for gpiod in ha-gpio and rewritten
-from scratch for gpiod by me. Just recently this code is
-copied back to ha-rpi_gpio
Via HACS: add as custom repository from github using this github https://github.com/jdeneef/ha_gpiod/
-(HACS => integrations => 3-dots menu => custom repositories,
-enter repository URL, select "Integrations" in Category drop-down, go
-back to hacs, install gpiod component, reboot, add config,
-reboot).
-If you run into errors, ensure HACS is up-to-date.
The gpiod platform will be initialized using the path to
-the gpio chip. When path is not in the config
-/dev/gpiochip[0-5] are tested for a gpiodevice having
-pinctrl, in sequence [0,4,1,2,3,5]. So with a
-raspberry pi you should be OK to leave the path empty.
| Raspberry Pi | -GPIO Device | -
|---|---|
| RPi3, RPi4 | -/dev/gpiochip0 |
-
| RPi5 | -/dev/gpiochip4 |
-
See also configuraton-example.yaml; note that below config shows most
-options, and can't be used as is, since cover reuses
-switch and sensor ports.
# setup gpiod chip; mostly not required
-gpiod:
- path: '/dev/gpiochip0'
-
-# Example of switches (eg switched leds or buzzer) with some sample parameters
-switch:
- - platform: gpiod
- switches:
- - name: "Led 1 red"
- port: 4
- - name: "Led 2 red"
- port: 17
- unique_id: "gpio_led_red_2"
- - name: "Led 3 yellow"
- port: 22
- active_low: true
- - name: "Led 6 green"
- port: 11
- bias: "AS_IS"
- drive: "PUSH_PULL"
- - name: "Fan"
- port: 8
- persistent: true
-
-# Example of binary_sensor (eg push button) setup
-binary_sensor:
- - platform: gpiod
- sensors:
- - name: "Button"
- port: 7
-
-# Example of cover setup
-cover:
- - platform: gpiod
- covers:
- - relay_port: 4
- name: Cover blue
- state_port: 7
- relay_time: 1200| Key | -Required | -Default | -Type | -Description | -
|---|---|---|---|---|
gpiod |
-only for path | -- | -- | -gpiod platform config and initialization, only required
-when you need to specify a specific gpiodevice path (see path) |
-
path |
-no | -discovered | -string | -path to gpio device, if not set auto discovered | -
The gpiod binary sensor platform allows you to read
-sensor values of the GPIOs of your device. To ensure consistence over
-reboots the sensor status is read at startup and set accordingly.
| Key | -Required | -Default | -Type | -Description | -
|---|---|---|---|---|
sensors |
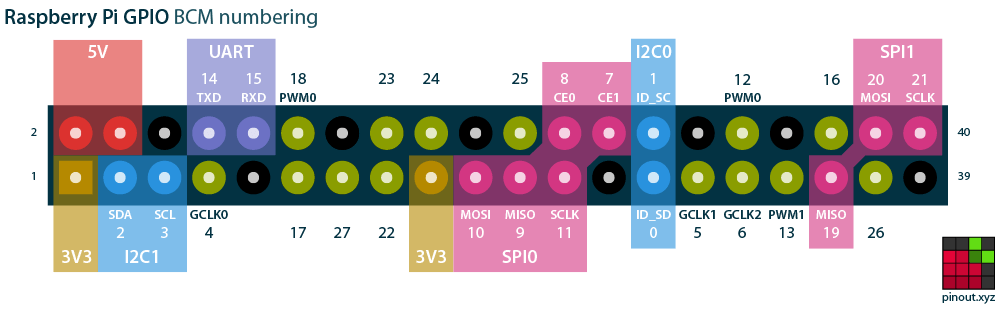
-yes | -- | list | -List of sensor IO ports (Raspberry Pi -BCM mode pin numbers) | -
name |
-yes | -- | string | -The name for the binary sensor entity | -
port |
-yes | -- | integer | -the GPIO port to be used | -
unique_id |
-no | -generated | -string | -An ID that uniquely identifies the sensor. Set this to a unique -value to allow customization through the UI, auto generated when not set -manually in config | -
debounce |
-no | -50 |
-integer | -The time in milliseconds for port debouncing | -
active_low or invert_logic1 |
-no | -false |
-boolean | -If true, input of gpio is inverted,
-active_low results in on;
-invert_logic kept for backwards compatibility |
-
bias or pull_mode |
-no | -PULL_UP |
-string | -control bias setting of GPIO, used to define the electrical state of
-a GPIO line when not actively driven; PULL_UP set weak
-pull-up resistor on the line, ensuring that the line is pulled to a high
-level (3.3V or 5V) when not actively driven; PULL_DOWN sets
-weak pull-down resistor to pull to low level (0V), DISABLED
-remains floating, AS_IS not changed; pull_mode
-kept for backwards compatibility |
-
The gpiod switch platform allows you to control the
-GPIOs of your device. To ensure consistence over restarts the
-persistent flag should be set.
| Key | -Required | -Default | -Type | -Description | -
|---|---|---|---|---|
switches |
-yes | -- | list | -List of switch IO ports (Raspberry Pi -BCM mode pin numbers) | -
name |
-yes | -- | string | -The name for the switch entity | -
port |
-yes | -- | integer | -the GPIO port to be used | -
unique_id |
-no | -generated | -string | -An ID that uniquely identifies the switch. Set this to a unique -value to allow customization through the UI, auto generated when not set -manually in config | -
active_low or invert_logic |
-no | -false |
-boolean | -If true, output of gpio is inverted,
-active_low switches on;
-invert_logic kept for backwards compatibility |
-
bias or pull_mode |
-no | -AS_IS |
-string | -Type of internal pull resistor to use: PULL_UP -
-pull-up resistor, PULL_DOWN - pull-down resistor,
-AS-IS no change; pull_mode kept for backwards
-compatibility |
-
drive |
-no | -PUSH_PULL |
-string | -control drive configuration of the GPIO, determines how the line
-behaves when it is set to output mode; PUSH_PULL, GPIO line
-can both source and sink current, can actively drive the line to both
-high and low states. OPEN-DRAIN, GPPIO can only sink
-current (drive the line to low) and is otherwise left floating, and
-OPEN-SOURCE the reverse. |
-
persistent |
-no | -false |
-boolean | -If true, the switch state will be persistent in HA and will be -restored if HA restart / crash. | -
The gpiod cover platform allows you to control GPIOs to
-open/close covers; note that I have only verified cover functionality
-simulating with switches and buttons, so logic could be off on some
-points .. Covers consist of a switch for triggering cover motor, and a
-state sensor for determining the state of the cover. This state is as
-for all sensors read at startup time, so should be consistent over
-reboots.
| Key | -Required | -Default | -Type | -Description | -
|---|---|---|---|---|
name |
-yes | -- | string | -The name for the cover entity | -
relay_port or relay_pin |
-yes | -- | integer | -Relay switch gpio switching cover motor; relay_pin kept
-for backwards compatibility |
-
relay_time |
-no | -200 |
-integer | -Time in milliseconds relay switch will be switched to open/close -cover | -
relay_active_low or invert_relay |
-no | -false |
-boolean | -invert input for relay_port; invert_relay
-kept for backwards compatibility |
-
relay_bias |
-no | -AS_IS |
-string | -Type of internal pull resistor to use: PULL_UP -
-pull-up resistor, PULL_DOWN - pull-down resistor |
-
relay_drive |
-no | -PUSH_PULL |
-string | -set relay_pin drive_mode, options:
-OPEN_DRAIN, OPEN_SOURCE,
-PUSH_PULL |
-
state_port or state_pin |
-yes | -- | integer | -State port for opened/closed status of cover; state_pin
-kept for backwards compatibility |
-
state_bias or state_pull_mode |
-no | -PULL_UP |
-string | -Type of internal pull resistor to use: PULL_UP -
-pull-up resistor, PULL_DOWN - pull-down resistor;
-state_pull_mode kept for backwards compatibility |
-
state_active_low or invert_state |
-no | -false |
-boolean | -invert output for state pin; invert_state kept for
-backwards compatibility |
-
state_debounce |
-no | -50 | -integer | -debounce parameter for the cover state sensor | -
unique_id |
-no | -generated | -string | -An ID that uniquely identifies the switch. Set this to a unique -value to allow customization through the UI, auto generated when not set -manually in config | -
Before reporting issues please add this to your
-configuration.yaml logger section, check logs
-and report issue adding logging.
logger:
- default: info
- logs:
- custom_components.gpiod: debugIn ha_gpiod the gpiod
-terminology is used as default, but the original
-ha-rpi_gpio config parameters are maintained for backwards
-compatibility. Using the gpiod terminology helps in
-understanding what the libgpiod is really doing.↩︎
{kind=link}