This repository has been archived by the owner on Apr 22, 2024. It is now read-only.
Hardware Layout
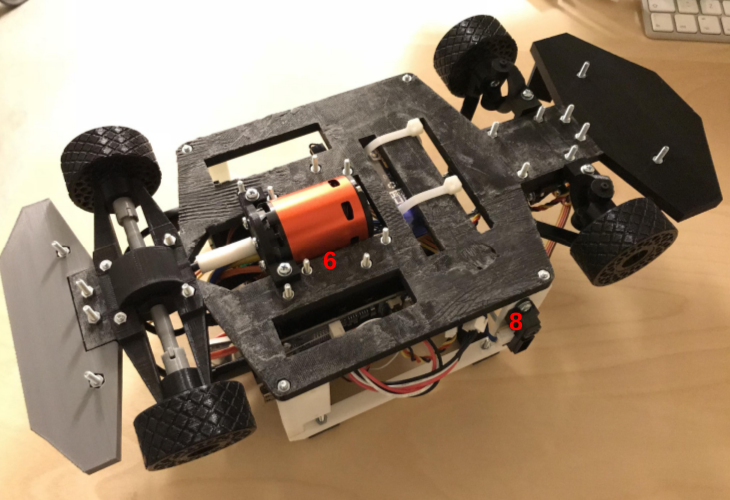
Hardware layout of the miniature car.
The components are listed below, to allow the user to search for datasheets of interest.
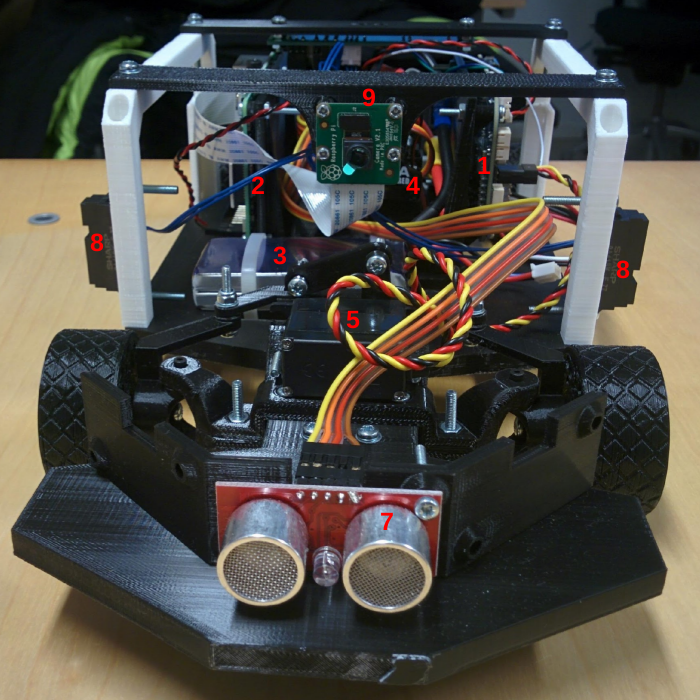
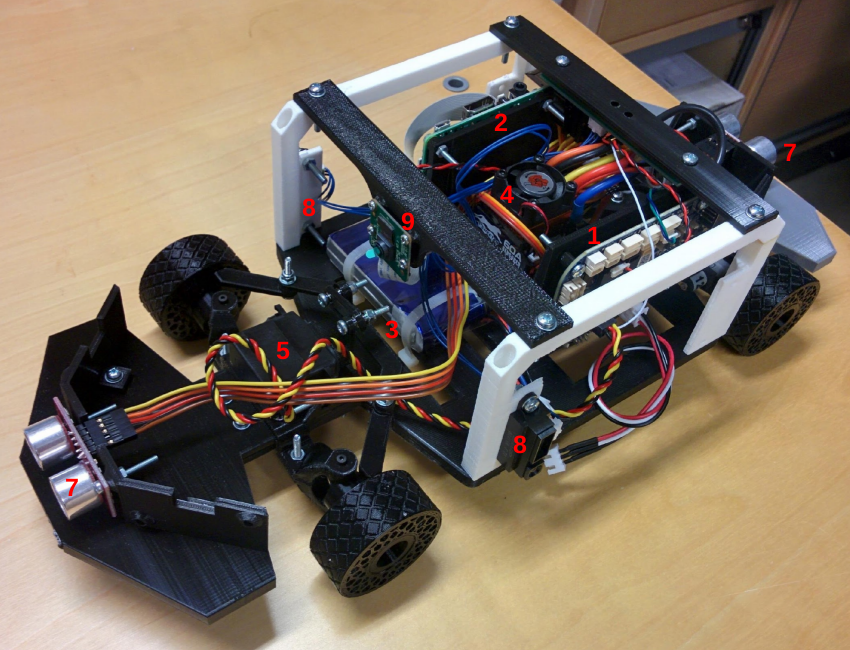
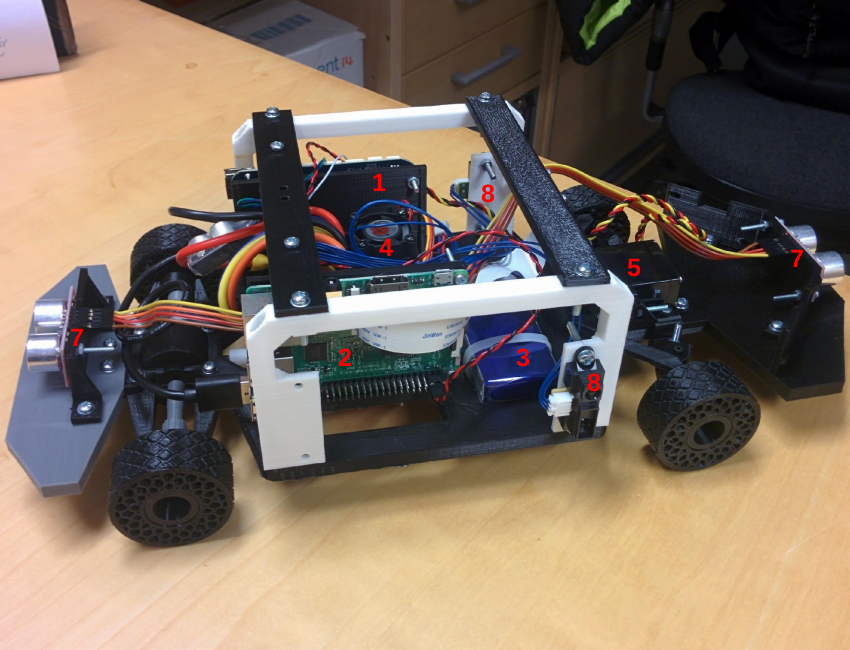
- BeagleBone Blue board
- Raspberry Pi 3 mod B board
- Battery [LiPo 7.4V 1200mAh 30C]
- Electronic Speed Control (ESC) unit [SKYRC Cheetah 60A Brushless ESC]
- Steering servo [Hitec Midi-Servo HS-5245MG]
- Motor [SKYRC Cheetah Brushless ESC]
- Ultrasonic sensors (front and rear) [Devantech SRF08]
- Infrared sensors (left and right) [Sharp GP2Y0A41SK0F]
- Raspberry Pi Camera Module v2
All the sensors with the exception of the camera are connected to a small PCB board, and finally to the BeagleBone Blue board.
The camera is instead directly connected to the Raspberry Pi board.
The two boards are connected by a USB cable, which is treated by both boards as a standard network connection. Both boards are also wireless-ready: in particular, the Raspberry Pi has WiFi capabilities, while the BeagleBone Blue has both WiFi and Bluetooth connectivity.