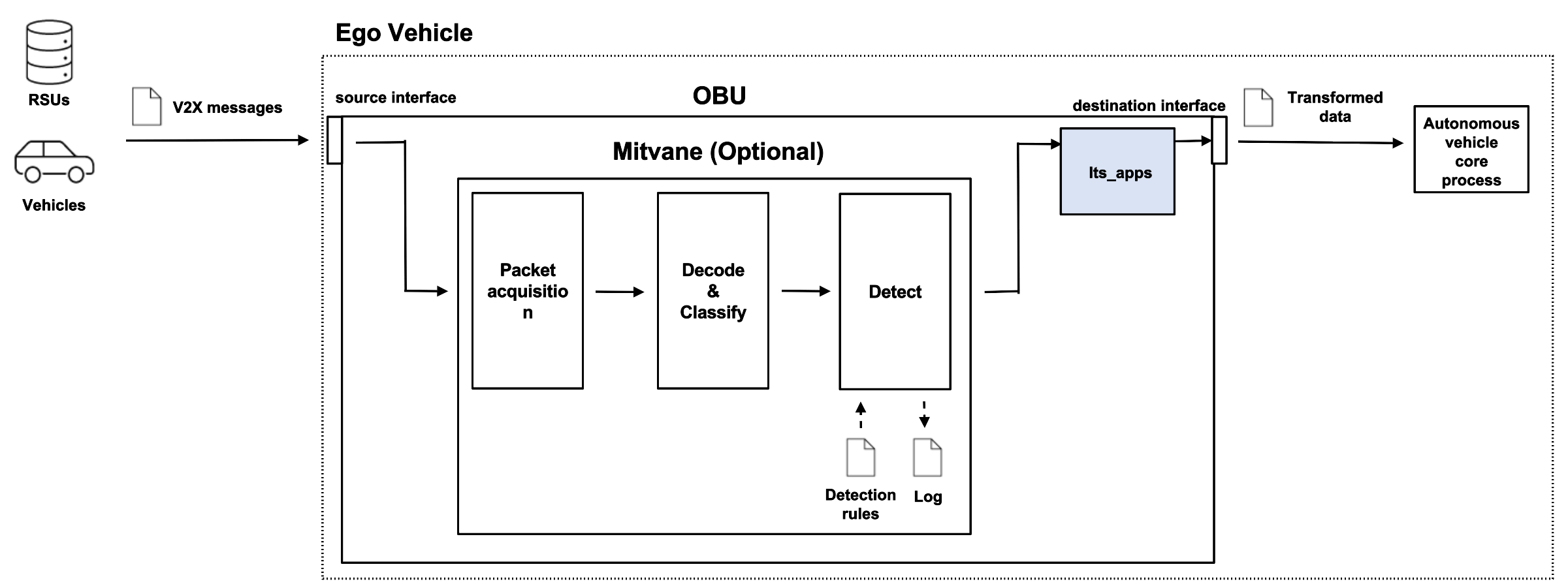
ITS applications transform data included in V2X messages and publish to ROS2 topics shared with the autonomous vehicle's core process.
Supported applications are
- CA (Cooperative Awareness)
- DEN (Decentralized Environment Notification) [Under development]
- RLT (Road and Lane Topology) [Under development]
- TLM (Traffic Light Maneuver) [Under development]
- CMake 3.5 or higher
- Vanetza 0.8 (https://www.vanetza.org)
- ROS2 (https://docs.ros.org/)
Supported ROS2 version: Galactic (https://docs.ros.org/en/galactic/index.html)
- build packages
source /opt/ros/$ROS_DISTRO/setup.bash
colcon build- launch its_apps
ros2 launch its_apps its_apps_launch.py - Connect to self-driving system through ROS bridge
- Subscribe to the topics from the self-driving system created by its_apps
Options of Vanetza (https://www.vanetza.org) are inherited. Values can be configured through launch file.
| parameter | default value | possible values | description |
|---|---|---|---|
| link-layer | ethernet | ethernet, cohda, udp | link layer type |
| interface | vboxnet0 | <string> | network interface name to receive messages |
| require-gnss-fix | False | True, False | enable/disable gnss fix |
| print-rx | False | True, False | enable/disable printing of received messages content |
| positioning | static | gpsd, static | positioning provider |
| latitude | 48.7668616 | <double> (-90-90) | latitude when the positioning provider is static |
| longitude | 11.423068 | <double> (-180-180) | longitude when the positioning provider is static |
| pos_confidence | 5.0 | <double> (0-100) | (100 - x)% circular confidence when the positioning provider is static |
| security | dummy | none, dummy, certs | security provider |
| certificate | "" | <string> | path to certificate file when the security provider is certs |
| certificate-key | "" | <string> | path to private key file when the security provider is certs |
its_apps is assumed to be deployed at OBU. The IDS/IPS (mitvane is optional. When mitvane is deployed, the source interface should be the destination interface of Mitvane. When mitvane is not deployed, the source interface should be the interface which captures V2X messages.
Other topics such as /denm_basic, /map_basic, /spat_basic would be added.
Besides, advanced topics like /traffic_light_state (can be extracted from SPAT message) would be supported.
| topic | description |
|---|---|
| /cam_basic | include basic information extracted from CAM |
$ ros2 topic echo /cam_basic
station_id: 1
generation_time: 60335
station_type: 5
latitude: 487668620
longitude: 114320680
---
station_id: 1
generation_time: 60335
station_type: 5
latitude: 487668620
longitude: 114320680
---