 +
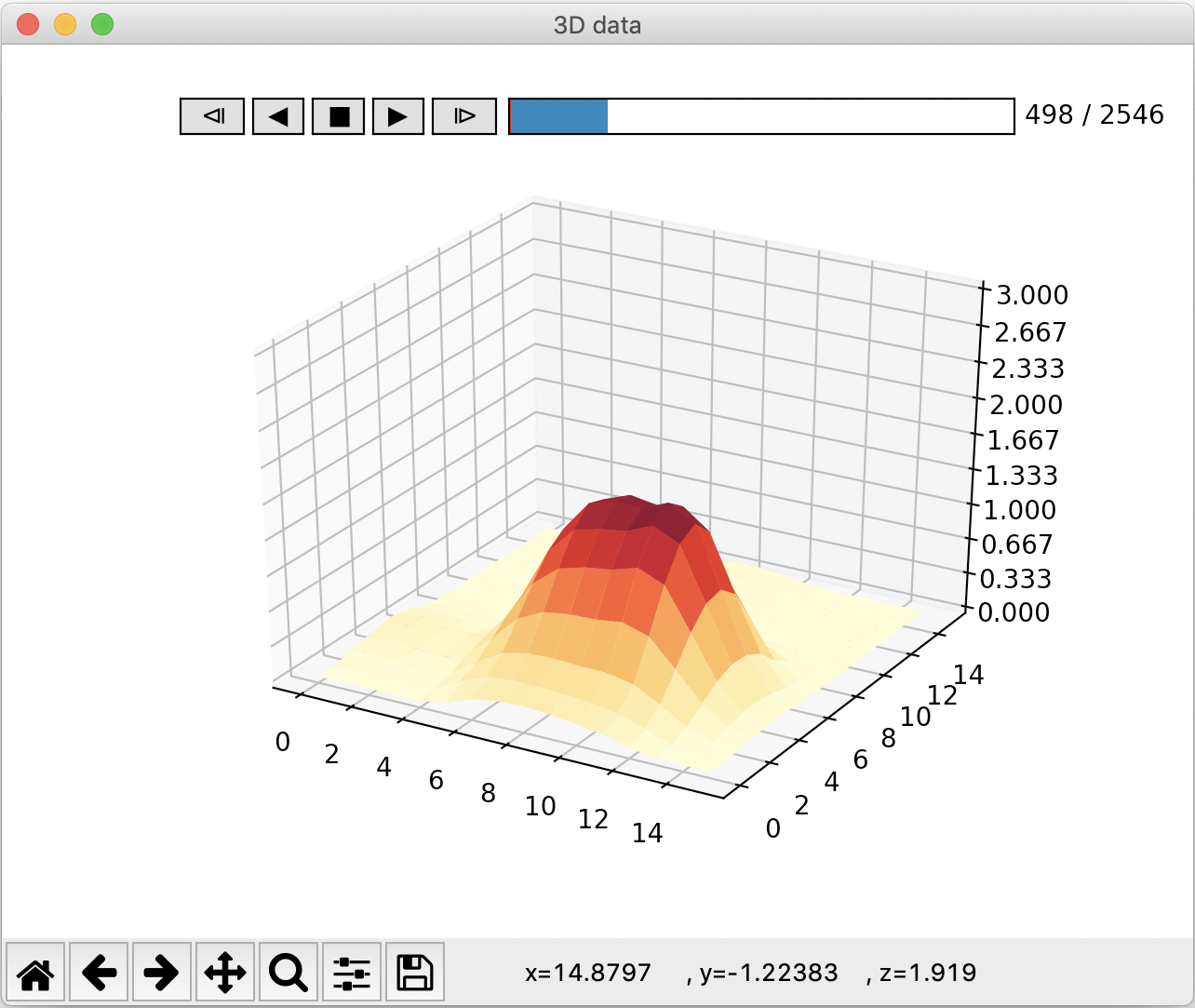
+3D visualization tools are provided to play real-time stream or recorded data.
+
+
+
+
+## Installation
+
+From PyPI:
+
+```sh
+pip install MatSense
+```
+
+This will install [Matplotlib](https://matplotlib.org/) to implement 3D visualization tools.
+
+If you want to further try [PyQtGraph](https://www.pyqtgraph.org/) as visualization method:
+
+```sh
+pip install MatSense[pyqtgraph]
+```
+
+
+
+## Usage
+
+### Off-the-shelf tools
+
+3 handy tools are provided. Pass `-h` to get detailed information.
+
+- `matserver` / `python -m matsense.server`
+ - functions:
+ - receive data from serial port, process and serve
+ - process data from file(s) and output to file
+ - other helpful functions
+ - supported processing methods:
+ - voltage-pressure conversion (optional for pressure data)
+ - spatial filter (in-frame denoising): none, ideal, butterworth, gaussian
+ - temporal filter (pixel-wise between-frame denoising): none, moving average, rectangular window
+ - calibration: static or dynamic
+- `matclient` / `python -m matsense.client`: receive server data, process and visualize; or control server via interactive commands
+ - supported processing methods:
- interpolation
- - blob filter
- - touch detection
-- 3D Visualization of matrix data
+ - blob parsing
+- `matdata` / `python -m matsense.data`: visualize file data, or process data
+
+### Configuration
+
+`matserver` and `matclient` can be totally configured by a YAML configuration file:
+
+```sh
+## server console
+matserver --config
+
+3D visualization tools are provided to play real-time stream or recorded data.
+
+
+
+
+## Installation
+
+From PyPI:
+
+```sh
+pip install MatSense
+```
+
+This will install [Matplotlib](https://matplotlib.org/) to implement 3D visualization tools.
+
+If you want to further try [PyQtGraph](https://www.pyqtgraph.org/) as visualization method:
+
+```sh
+pip install MatSense[pyqtgraph]
+```
+
+
+
+## Usage
+
+### Off-the-shelf tools
+
+3 handy tools are provided. Pass `-h` to get detailed information.
+
+- `matserver` / `python -m matsense.server`
+ - functions:
+ - receive data from serial port, process and serve
+ - process data from file(s) and output to file
+ - other helpful functions
+ - supported processing methods:
+ - voltage-pressure conversion (optional for pressure data)
+ - spatial filter (in-frame denoising): none, ideal, butterworth, gaussian
+ - temporal filter (pixel-wise between-frame denoising): none, moving average, rectangular window
+ - calibration: static or dynamic
+- `matclient` / `python -m matsense.client`: receive server data, process and visualize; or control server via interactive commands
+ - supported processing methods:
- interpolation
- - blob filter
- - touch detection
-- 3D Visualization of matrix data
+ - blob parsing
+- `matdata` / `python -m matsense.data`: visualize file data, or process data
+
+### Configuration
+
+`matserver` and `matclient` can be totally configured by a YAML configuration file:
+
+```sh
+## server console
+matserver --config