Autor to artigo orginal em inglês: J David Eisenberg
Esta é uma tradução de 2D Transformations disponível em processing.org/tutorials mantendo a licença Creative Commons BY-NC-SA 4.0.
Baixe os arquivos deste tutorial
Processing tem funções embutidas que tornam fácil você mover, girar, ecrescer ou encolher objetos em um sketch. Este tutorial vai apresentar você às funções translate, rotate, e scale. De maneira que você as possa usar nos seus sketches.
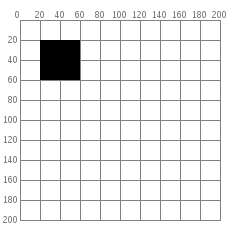
Como você sabe, sua janela do Processing funciona como um pedaço de papel quadriculado. Quando você quer desenhar alguma coisa, especifica as cordenadas. Veja um retângulo simples desenhado com o código rect(20, 20, 40, 40). O sistema de coordenadas (um nome sofisticado para o nosso "papel quadriculado") é mostrado aqui em cinza.
Se você quiser mover o retângulo 60 unidades para a direita e 80 unidades para baixo, pode mudar as coordenadas somando ao x e y do ponto inicial: rect(20 + 60, 20 + 80, 40, 40) e o retângulo vai aparecer em um local diferente. (Pusemos a seta aí para efeito dramático.)
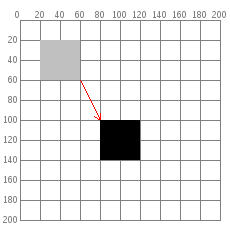
Mas tem uma maneira mais interessante de fazer isso: em vez disso mover o papel quadriculado. Se você move o papel quadriculado 60 unidades para a direita e 80 para baixo vai obter exatamente o mesmo resultado visual. Mover o sistema de coordenadas é chamado de translação.
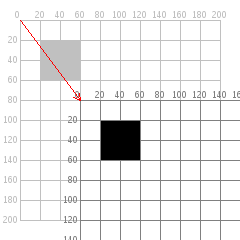
A coisa importante de se notar no diagrama anterior é que, do ponto de vista do retângulo, ele não se moveu nada. O canto superior esquerdo continual em (20,20). Quando você usa transformações, as coisas que você desenha nunca mudam de posição; o sistema de cordenadas muda.
Abaixo o código que desenha o retângulo em vermelho mudando suas coordenadas, e então desenha em azul movendo a grade. Os retângulos são translúcidos de maneira que você pode ver que estão (visualmente) no mesmo lugar. Apenas o método usado para movê-los mudou. Copie este código no Processing e experimente:
def setup():
size(200, 200)
background(255)
noStroke()
# desenha na posição original em cinza
fill(192)
rect(20, 20, 40, 40)
# vermelho translúcido mudando as coordenadas
fill(255, 0, 0, 128)
rect(20 + 60, 20 + 80, 40, 40)
# azul translúcido mudando a grade
fill(0, 0, 255, 128)
pushMatrix()
translate(60, 80)
rect(20, 20, 40, 40)
popMatrix()Vamos olhar o código de conversão em mais detalhes.pushMatrix() é uma função embutida que salva a posição atual do sistema de coordendas. O translate(60, 80) move o sistema de coordenadas 60 para direita e 80 para baixo. O rect(20, 20, 40, 40) desenha o retângulo no mesmo local em que estava originalmente. Lembre-se de que as coisas que você desenha não se movem - a grade se move. Por fim,popMatrix() restaura o sistema de coordenadas como estava antes de você fazer a translação.
Sim, você podia ter feito uma translação translate(-60, -80) para mover a grade de volta a sua posição original. No entanto, quando você começa a executar operações mais sofisticadas com o sistema de coordenadas, é mais fácil usar pushMatrix() e popMatrix() para salvar e restaurar o status em vez de precisar desfazer todas as suas operações. Mais adiante neste tutorial, você descobrirá por que essas funções parecem ter nomes tão estranhos.
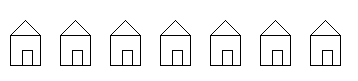
Você pode estar pensando que pegar o sistema de coordenadas e movê-lo é muito mais complicado do que apenas adicionar às coordenadas. Para um exemplo simples, como o retângulo, você está correto. Mas vamos dar um exemplo de onde o translate() pode facilitar a vida. Aqui está um código que desenha uma fileira de casas. Ele usa um loop que chama a função chamada casa(), que recebe o x e y da posição do canto superioe esquerdo da casa como parâmetros.
def setup():
size(400, 100)
background(255)
for i in xrange(10,350,50):
casa(i, 20)Este é o código para desenhar a casa alterando sua posição. Veja todos os acréscimos que você precisa acompanhar.
def casa(int x, int y):
triangle(x + 15, y, x, y + 15, x + 30, y + 15)
rect(x, y + 15, 30, 30)
rect(x + 12, y + 30, 10, 15)Compare isso com a versão da função que usa translate(). Neste caso o código desenha a casa no mesmo lugar, com o canto superior esquerdo em (0, 0), e deixa a translação fazer todo o trabalho.
def casa(int x, int y):
pushMatrix()
translate(x, y)
triangle(15, 0, 0, 15, 30, 15)
rect(0, 15, 30, 30)
rect(12, 30, 10, 15)
popMatrix()
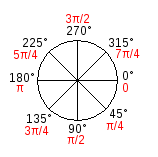
Além da translação, que move a grade, é possível girar o sistema de coordenadas com a função rotate(). Essa função tem um parâmetro ou argumento, um número de radianos que você quer rodar. Em graus, um círculo tem 360°. Quando descrevemos os ângulos em radianos, a circuferência completa tem 2π radianos. Eis aqui um diagrama de como Processing mede ângulos em graus (preto) e radianos (vermelho).
Como a maioria das pessoas pensa em graus, o Processing possui uma função embutida radians() que recebe um número em graus como argumento e o converte para você. Ele também possui uma função degrees() que converte radianos em graus. Dado esse cenário, vamos tentar girar um quadrado 45 graus no sentido horário.
def setup():
size(200, 200)
background(255)
smooth()
fill(192)
noStroke()
rect(40, 40, 40, 40)
pushMatrix()
rotate(radians(45))
fill(0)
rect(40, 40, 40, 40)
popMatrix()Ei o que aconteceu? Como o quadrado foi movido e cortadao A resposta é: o quadrado não se moveu. A grade foi girada. Aqui está o que realmente aconteceu. Como você pode ver, no sistema de coordenadas girado, o quadrado ainda tem seu canto superior esquerdo em (40, 40).
A maneira certa de girar o quadrado é:
- Faça a translação da origem do sistema de coordenadas (0, 0) para onde você quer que seja o canto superior esquerdo do quadrado.
- Gire a grade π/4 radianos (45°)
- Desenhe o quadrado na origem.
E aqui está o código que gera o resultado, sem as marcas de grade.
def setup():
size(200, 200)
background(255)
smooth()
fill(192)
noStroke()
rect(40, 40, 40, 40)
pushMatrix()
# mova a origem para o ponto de giro
translate(40, 40)
# em seguida gire a grade
rotate(radians(45))
# e desenhe o quadrado na origem
fill(0)
rect(0, 0, 40, 40)
popMatrix()E aqui um programa que gera uma roda de cores usando rotação. A captura de tela é reduzida para economizar espaço.
def setup():
size(200, 200)
background(255)
smooth()
noStroke()
def draw():
if (frameCount % 10 == 0):
fill(frameCount * 3 % 255, frameCount * 5 % 255,
frameCount * 7 % 255)
pushMatrix()
translate(100, 100)
rotate(radians(frameCount * 2 % 360))
rect(0, 0, 80, 20)
popMatrix()A transformação final do sistema de coordenadas é a mudança de escala, que altera o tamanho da grade. Dê uma olhada neste exemplo, que desenha um quadrado, depois redimensiona a grade para o dobro do tamanho normal e a desenha novamente.
def setup():
size(200,200)
background(255)
stroke(128)
rect(20, 20, 40, 40)
stroke(0)
pushMatrix()
scale(2.0)
rect(20, 20, 40, 40)
popMatrix()Primeiro, você pode ver que o quadrado parece ter se movido. Claro que não. Seu canto superior esquerdo ainda está em (20, 20) na grade escalada para cima, mas esse ponto está agora duas vezes mais distante da origem do que no sistema de coordenadas original. Você também pode ver que as linhas são mais grossas. Isso não é ilusão de ótica - as linhas realmente têm o dobro da espessura, porque o sistema de coordenadas foi dimensionado para dobrar seu tamanho.
Desafio de programação aumente a o tamnaho do quadrado preto, mas mantenha o cantto superior esquerdo dele no mesmo lugar do quadrado cinza. Dica: use
translate()para mover a origem, então usescale().
Não tem uma lei que diz que você tem que escalar as dimensões em x e y igualmente. Tente usar scale(3.0, 0.5) para fazer a dimensão em x três vezes maior e a dimensão em y metade do tamanho normal.
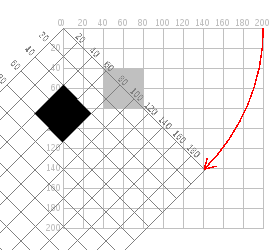
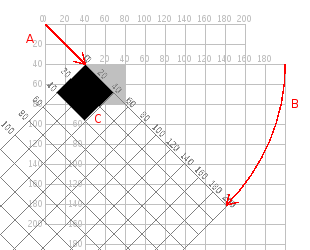
Quando você faz várias transformações, a ordem faz diferença. Uma rotação seguida de uma translação seguida por uma mudança de escala não produzirá os mesmos resultados que uma translação seguida de uma rotação e uma mudança de escala. Aqui está um exemplo de código e os resultados.
def setup():
size(200, 200)
background(255)
smooth()
line(0, 0, 200, 0) # desenha eixos
line(0, 0, 0, 200)
pushMatrix()
fill(255, 0, 0) # quadrado vermelho
rotate(radians(30))
translate(70, 70)
scale(2.0)
rect(0, 0, 20, 20)
popMatrix()
pushMatrix()
fill(255) # quadrado branco
translate(70, 70)
rotate(radians(30))
scale(2.0)
rect(0, 0, 20, 20)
popMatrix()
Sempre que você faz uma rotação, translação ou mudança de escla, as informações necessárias para a transformação são acumuladas em uma tabela de números. Essa tabela, ou matriz, possui apenas algumas linhas e colunas; no entanto, através do milagre da matemática, ela contém todas as informações necessárias para realizar qualquer série de transformações. E é por isso que pushMatrix () e popMatrix () têm essa palavra em seu nome.
Sobre a parte push e pop dos nomes? Elas vêm de um conceito de computação conhecido como pilha, que funciona como um dispensador de bandejas com mola em uma lanchonete. Quando alguém devolve uma bandeja para a pilha, seu peso empurra a plataforma para baixo. Quando alguém precisa de uma bandeja, ela a pega da parte superior da pilha e as bandejas restantes aparecem um pouco.
De maneira semelhante, pushMatrix() coloca o status atual do sistema de coordenadas no topo de uma área de memória, e popMatrix() pega de volta o status. O exemplo anterior usou pushMatrix() e popMatrix() para garantir que o sistema de coordenação estivesse "limpo" antes de cada parte do desenho. Em todos os outros exemplos, as chamadas para essas duas funções não eram realmente necessárias, mas não custa nada salvar e restaurar o status da grade.
Nota: Em Processing, o sistema de coordenadas é restaurado ao seu estado original (origem na parte superior esquerda da janela, sem rotação e sem mudança de escala) toda vez que a função draw \() é executada.
Se você estiver trabalhando em três dimensões, poderá chamar a função translate() com três argumentos para as distâncias x, y, e z. Da mesma forma, você vhama scale() com três argumentos que indicam o quanto você deseja que a grade seja redimensionada em cada uma dessas dimensões
Para rotação, chame as funções rotateX(), rotateY(), ou rotateZ() para girar em torno de cada um dos eixos. Todas essas três funções esperam um argumento: o número de radianos a serem rotacionados.
Vamos usar essas transformações para animar um robô azul agitando os braços. Em vez de tentar escrever tudo de uma vez, faremos o trabalho em etapas. O primeiro passo é desenhar o robô sem nenhuma animação.
O robô é baseado em thisdrawing, embora não pareça tão charmoso. Primeiro, desenhamos o robô para que sua esquerda e a parte superior toquem os eixos x e y. Isso nos permitirá usar translate() para posicionar facilmente o robô em qualquer lugar que desejarmos ou que façamos várias cópias do robô, como fizemos no exemplo das casas.
Quando nos referimos à esquerda e à direita neste desenho, queremos dizer sua esquerda e direita (o lado esquerdo e direito do monitor), não o esquerdo e o direito do robô.
def setup():
size(200, 200)
background(255)
smooth()
drawRobot()
def drawRobot():
noStroke()
fill(38, 38, 200)
rect(20, 0, 38, 30) # cabeça
rect(14, 32, 50, 50) # corpo
rect(0, 32, 12, 37) # braço esquerdo
rect(66, 32, 12, 37) # braço direito
rect(22, 84, 16, 50) # perna esquerda
rect(40, 84, 16, 50) # perna direita
fill(222, 222, 249)
ellipse(30, 12, 12, 12) # olho esquerdo
ellipse(47, 12, 12, 12) # olho direito
O próximo passo é identificar os pontos nos quais os braços giram. Isso é mostrado neste desenho. Os pontos de articulação são (12, 32) e (66, 32). Nota: o termo "centro de rotação" é um termo mais formal para o ponto de articulação.
Agora separe o código para desenhar os braços direito e esquerdo, e mova o centro de rotação de cada braço para a orgigem, porque você sempre gira em torno do ponto (0, 0). Para economizar espaço, não estamos repetindo o código para setup().
def drawRobot():
noStroke()
fill(38, 38, 200)
rect(20, 0, 38, 30) # cabeça
rect(14, 32, 50, 50) # corpo
drawLeftArm()
drawRightArm()
rect(22, 84, 16, 50) # perna esquerda
rect(40, 84, 16, 50) # perna direita
fill(222, 222, 249)
ellipse(30, 12, 12, 12) # olho esquerdo
ellipse(47, 12, 12, 12) # olho direito
def drawLeftArm():
pushMatrix()
translate(12, 32)
rect(-12, 0, 12, 37)
popMatrix()
def drawRightArm():
pushMatrix()
translate(66, 32)
rect(0, 0, 12, 37)
popMatrix()Agora, teste para ver se os braços giram corretamente. Em vez de tentar uma animação completa, iremos apenas girar o braço esquerdo esquerdo 135 graus e o braço direito -45 graus como teste. Aqui está o código que precisa ser adicionado e o resultado. O braço esquerdo foi cortado por causa dos limites da janela, mas corrigiremos isso na animação final.
def drawLeftArm():
pushMatrix()
translate(12, 32)
rotate(radians(135))
rect(-12, 0, 12, 37) # braço esquerdo
popMatrix()
def drawRightArm():
pushMatrix()
translate(66, 32)
rotate(radians(-45))
rect(0, 0, 12, 37) # braço direito
popMatrix()Agora, concluímos o programa inserindo a animação. O braço esquerdo deve girar de 0° a 135° e vice-versa. Como o movimento do braço é simétrico, o ângulo do braço direito sempre será o valor negativo do ângulo do braço esquerdo. Para simplificar, iremos em incrementos de 5 graus.
armAngle = 0
angleChange = 5
ANGLE_LIMIT = 135
def setup():
size(200, 200)
smooth()
frameRate(30)
def draw():
global armAngle, angleChange, ANGLE_LIMIT
print armAngle
background(255)
pushMatrix()
translate(50, 50) # para que os braços caibam na tela
drawRobot()
armAngle += angleChange
# se o braço ultrapassou seu limite,
# inversta a direção e ponha no limite.
if armAngle > ANGLE_LIMIT or armAngle < 0:
angleChange = -angleChange
armAngle += angleChange
popMatrix()
def drawRobot():
noStroke()
fill(38, 38, 200)
rect(20, 0, 38, 30) # cabeça
rect(14, 32, 50, 50) # corpo
drawLeftArm()
drawRightArm()
rect(22, 84, 16, 50) # perna esquerda
rect(40, 84, 16, 50) # perna direita
fill(222, 222, 249)
ellipse(30, 12, 12, 12) # olho esquerdo
ellipse(47, 12, 12, 12) # olho direito
def drawLeftArm():
global armAngle
pushMatrix()
translate(12, 32)
rotate(radians(armAngle))
rect(-12, 0, 12, 37) # braço esquerdo
popMatrix()
def drawRightArm():
global armAngle
pushMatrix()
translate(66, 32)
rotate(radians(-armAngle))
rect(0, 0, 12, 37) # braço direito
popMatrix()Em vez de mover dos braços se mexerem sozinhos, modificaremos o programa para que os braços sigam o mouse quando o botão do mouse é pressionado. Em vez de sair escrevendo o programa com o teclado, vamos primeiro pensar no problema e descobrir o que o programa precisa fazer.
Como os dois braços se movem independentemente um do outro, precisamos ter uma variável para o ângulo de cada braço. É fácil descobrir qual braço rastrear. Se o mouse estiver no lado esquerdo do centro do robô, acompanhe o braço esquerdo; caso contrário, acompanhe o braço direito.
O problema restante é descobrir o ângulo de rotação. Dada a posição do ponto de articulação e a posição do mouse, como você determina a alteração de uma linha que liga esses dois pontos? A resposta vem da funçãoatan2(), que fornece (em radianos) o ângulo de uma linha da origem até uma determinada coordenada y e x. Em contraste com a maioria das outras funções, a coordenada y vem primeiro. atan2() devolve um valor de -π a π radianos, que é equivalente a de -180° a 180°.
Mas e quanto a encontrar o ângulo de uma linha que não começa na origem, como a linha de (10, 37) a (48, 59)? Sem problema; É o mesmo que o ângulo de uma linha de (0, 0) a (48-10, 59-37). Generalizando, para encontrar o ângulo da linha de (x0, y0) a (x1, y1), calcule
atan2(y1 - y0, x1 - x0)Como esse é um conceito novo, em vez de integrá-lo ao programa do robô, você deve escrever um programa de teste simples para entender como o atan2() funciona. Este programa desenha um retângulo cujo centro de rotação está no canto superior esquerdo em (100, 100) e rastreia o mouse.
def setup():
size(200, 200)
def draw():
angle = atan2(mouseY - 100, mouseX - 100)
background(255)
pushMatrix()
translate(100, 100)
rotate(angle)
rect(0, 0, 50, 10)
popMatrix()Isso funciona muito bem. O que acontece se desenharmos o retângulo para que fique mais alto do que largo? Mude o código anterior para lerrect (0, 0, 10, 50). Como é que não parece mais seguir o mouse? A resposta é que o retângulo ainda segue o mouse, mas é o lado mais curto do retângulo que segue. Nossos olhos são treinados para que o lado mais longo seja rastreado. Como o lado longo está em um ângulo de 90 graus em relação ao lado mais curto, é necessário subtrair 90° (ou π/2 radianos) para obter o efeito desejado. Altere o código anterior para rotate(angle - HALF_PI) e tente novamente. Como o Processing trabalha quase exclusivamente com radianos, a linguagem definiu as constantes PI (180°), HALF_PI (90°), QUARTER_PI (45°) e TWO_PI (360°) para sua conveniência.
Neste ponto, podemos escrever a versão final do programa de rastreamento dos braços. Começamos com definições de constantes e variáveis. O número 39 na definição de MIDPOINT_X deriva do fato de que o corpo do robô começa na coordenada x 14 e tem 50 pixels de largura, então 39 (14 + 25) é o ponto médio horizontal do corpo do robô.
# Where upper left of robot appears on screen
ROBOT_X = 50
ROBOT_Y = 50
# The robot's midpoint and arm pivot points
MIDPOINT_X = 39
LEFT_PIVOT_X = 12
RIGHT_PIVOT_X = 66
PIVOT_Y = 32
leftArmAngle = 0.0
rightArmAngle = 0.0
def setup():
size(200, 200)
smooth()
frameRate(30)A função draw() é a próxima. Ela vai determinar que se o mouse está apertado e o ângulo entre o mouse e o ponto de articulação, definindo leftArmAngle (ângulo do braço esquerdo) e rightArmAngle (ângulo do braço direito) de acordo.
def draw():
"""
Estas variáveis são adjustadas com mouseX and mouseY,
para serem relativas ao sistema de coordenadas
do robô em vez do sistema de coordenadas da janela.
"""
background(255)
pushMatrix()
translate(ROBOT_X, ROBOT_Y) # locar robô para caber braços
if mousePressed:
mX = mouseX - ROBOT_X
mY = mouseY - ROBOT_Y
if mX < MIDPOINT_X: # lado direito do robô
leftArmAngle = atan2(mY - PIVOT_Y,
mX - LEFT_PIVOT_X) - HALF_PI
else:
rightArmAngle = atan2(mY - PIVOT_Y,
mX - RIGHT_PIVOT_X) - HALF_PI;
drawRobot()
popMatrix()A função drawRobot() continua inalterada, mas uma pequena mudança em drawLeftArm() e drawRightArm() agora é necessária. Uma vez que leftArmAngle erightArmAngle são agora computadas em radianos, as funções não tem mais que fazer nenhuma conversão. As mudanças nas funções foram indicadas com comentários.
def drawLeftArm():
pushMatrix()
translate(12, 32)
rotate(leftArmAngle) # mudou
rect(-12, 0, 12, 37) # braço esquerdo
popMatrix()
def drawRightArm():
pushMatrix()
translate(66, 32)
rotate(rightArmAngle) # mudou
rect(0, 0, 12, 37) # braço direito
popMatrix()
Você pode baixar os arquivos do tutorial original (py.processing.org/tutorials/transform2d), incluido o programa para fazer os diagramas de grade.