Home
![]()
Outline and overview of works contributed by all members and alumnis from the University of Waterloo Advanced Robotics Lab (aka Waterloo Mechanical Systems & Control Lab.
- Supervisor: Professor Soo Jeon
- People: https://uwaterloo.ca/waterloo-mechanical-systems-control-lab/our-people
- Publication: https://uwaterloo.ca/waterloo-mechanical-systems-control-lab/publications
![]()
-
🏷️ [ Lab ]: <--- Lab related information
Topics Note 💠 Code of Conduct Code of Conduct, with UW Academic Code of Conduct 💠 Getting Started 🚧 ideally a manual for new comers to get started, :) 💠 List of Projects and Papers 🚧 List of Research Projcets (Incomplete List) that are public 💠 User Guide 🚧 User Guide on GitHub -
🏷️ [ Logbook ]: <--- Log book for some of the trouble that was encountered (log and maybe messy
⚠️ , use only if encountering issues)Logs Note 💠 Jetson Setup Manual setup logs for Jetson Orin, includes cross-compiling Kernels (now, mostly automated) 💠 Ubuntu Setup Ubuntu Setup (now, mostly automated) 💠 WAM PC Setup Internal / External WAM PC Manual Setup , (now, mostly automated) 💠 Waterloo Steel V2 Upgrade Logs on manual upgrades from V1-->V2-->V3 , V3 is managed completely by uwarl-robot_configs 💠 ZED Camera Setup Zed related issues, including hardware repair -
🏷️ [ Tips ]: <--- A guide/tip that helps YOU to guide you when you are lost
Tips Note 💠 Better Research Tips and setups related to efficient research 💠 Coding Guidelines General Guides: Github, Git, Documentation, Python 💠 Dev Tools Development Tools: Git, Linux, VM, ... (incomplete), besides our semi-automated uwarl-robot_configs packages -
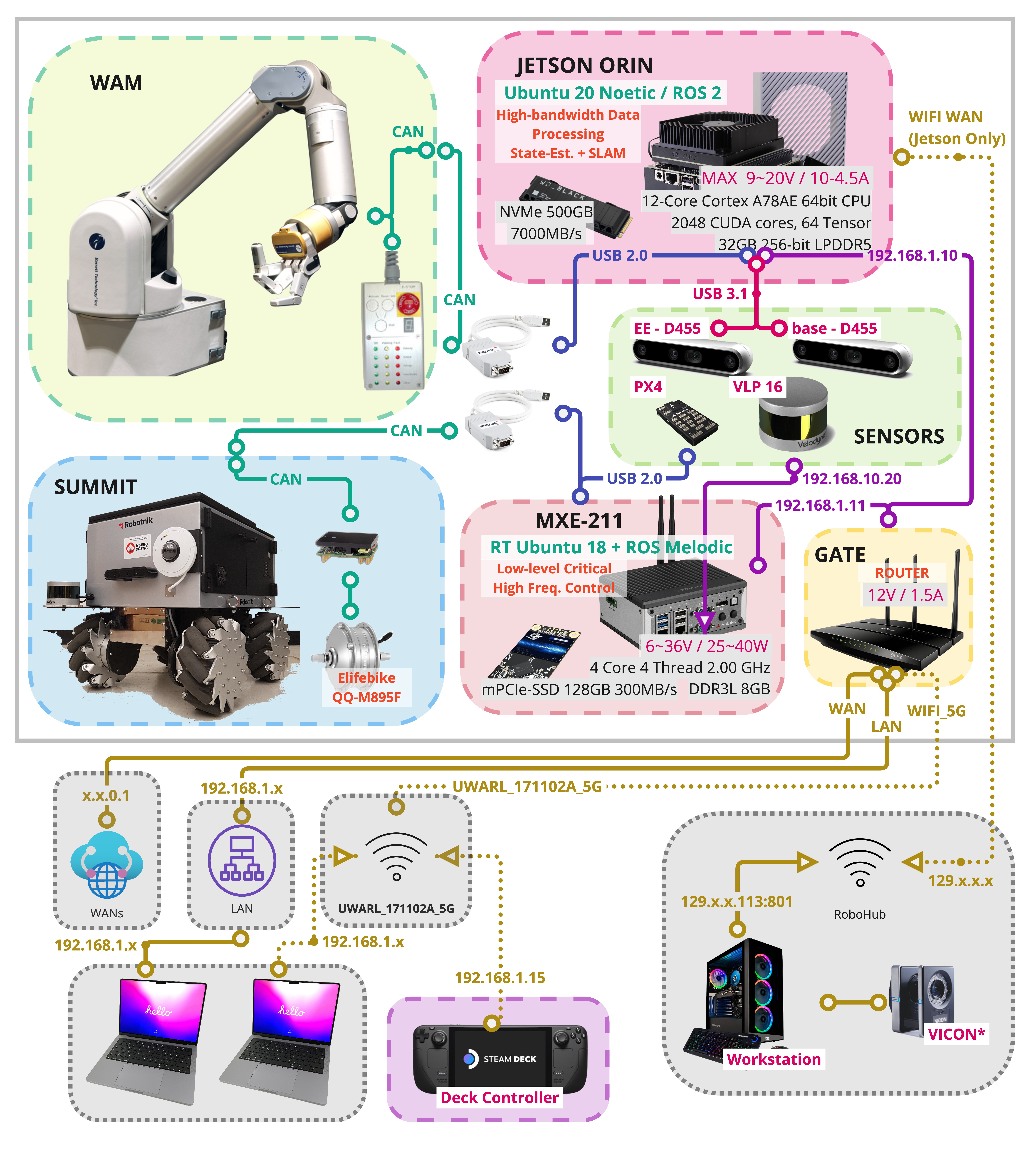
🏷️ [ Waterloo Steel ]: <--- 🌟 The VIP (Very Important Pages) related to our hardware and development platform (Concised and actively maintained)
Directory Note 💠 Automated Robot Configs 🧀 How to use our automated configuration toolchain: uwarl-robot_configs, latest @Readme.md 💠 Platform Instruction ☑️ Platform Instructions: Powering, Launching, Networking, ROS, Development, Troubleshoots 💠 Platform Launch Demos 🚀 Platform Launch Demos: Demos launching instructions 💠 Platform Setup Hardware 🤖 Platform Setup for Robot Hardware: MXE 211, Jetson Orin, Steam Deck, Common in Linux with uwarl-robot_configs 💠 Platform Setup Workstation 💻 HOW TO SETUP YOUR LAPTOP Linux / Linux VM (Ubuntu 18/20 , melodic / noetic) with uwarl-robot_configs 💠 Spec Hardware ⚙️ Hardware specifications 💠 Spec Links 🔗 Other commonly used links related to hardware specs
| Clicke Here to Download PDF Version |
|---|
-
🏷️ [ Lab ]:
-
🏷️ [ Logbook ]:
-
🏷️ [ Tips ]:
-
🏷️ [ Waterloo Steel ]: