Communication
Language
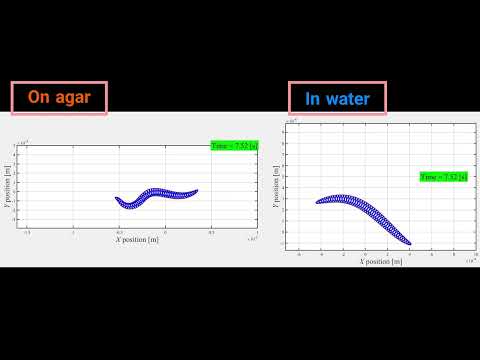
An integrated neuromechanical model for the nematode, C. elegans, which is modeled by Jordan H. Boyle (Boyle et al., 2012)1.
An integrated neuromechanical model for the nematode, C. elegans, which is modeled by Jordan H. Boyle (Boyle et al., 2012). This nematode model is ported in MATLAB Simulink, which is verified in MATLAB R2018a, from the implicit solver (SUNDIALS IDA 2.3.0) with C++ of the original paper 1.

[Step 1] Open "GUI.fig"
[Step 2] Push "parameter" button
[Step 3] Select the fluid model
in Water
C_par = 5.2e-6; %% 横方向抗力 [kg/s]
C_per = 3.3e-6; %% 推進方向抗力 [kg/s]
on Agar
C_par = 128e-3; %% 横方向抗力 [kg/s]
C_per = 3.2e-3; %% 推進方向抗力 [kg/s]
[Step 3] Execute the "exe.m" to start numerical analysis
[Step 4] Push "plot" button to see results
in Water

on Agar