-
Notifications
You must be signed in to change notification settings - Fork 25
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Abhijit-2592
committed
Mar 6, 2018
1 parent
ede2fb6
commit 7197b99
Showing
54 changed files
with
2,590 additions
and
2 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,2 +1,96 @@ | ||
| # camera_calibration | ||
| A simple Python API for single camera calibration using opencv | ||
| # image_proc | ||
| **A repository containing various source codes for conventional image processing** | ||
|
|
||
| ### Repository Overview: | ||
|
|
||
| [camera_calibration.py](./camera_calibration.py):contains an API which tries to minic the MATLAB's camera calibration app functionality. This API is a thin wrapper around the opencv's camera calibration functionalities. | ||
|
|
||
| [utils.py](./utils.py): contains various utility scripts | ||
|
|
||
| [examples](./examples): A diretory containing various examples | ||
|
|
||
|
|
||
| ### Camera_Calibration_API: | ||
|
|
||
| #### Introduction: | ||
| The Camera Calibration API is a wrapper around the opencv's camera calibration functionalities. This tries to mimic the MATLAB camera calibration app's functionality in `python`. The API supports all the 3 calibration patterns supported by opencv namely: **Chessboards**, **Asymmetric circular grids** and **Symmetric circular grids.** The API by default runs on 4 threads for speedup. The speed-up may not be marginal in the case of **chessboard** calibration because in most cases the bottle neck will be a single chessboard image (run on a single core) which the algorithm takes time to detect. | ||
|
|
||
| #### Dependencies: | ||
| * `works in both python-3 and python-2` | ||
| * `opencv (Tested in version 3.3.0)` | ||
| * `numpy` | ||
| * `matplotlib` | ||
| * `pickle` | ||
| * `argparse` | ||
| * `glob` | ||
| * `pickle` | ||
| * `multiprocessing` | ||
| * `os` | ||
| * `pandas` | ||
|
|
||
| #### Example: | ||
| Examples to use the Camera_Calibration_API() for calibration using chessboard, symmetric circular grids and asymmetric circular grids can be found in the [examples](./examples/example_notebooks) folder | ||
|
|
||
| #### Features: | ||
| * Supports all the 3 calibration patterns supported by opencv : **Chessboards**, **Asymmetric circular grids** and **Symmetric circular grids.** | ||
| * Additionally a **custom** calibration pattern can also be implemented. (Look at the next section for how to calibrate using custom pattern.) | ||
| * Visualizes the **Reprojection error plot** | ||
| * Ability to **Recalibrate** the camera by neglecting the images with very high reprojection errors. | ||
| * **Camera centric and Pattern centric** views can be visualized using the `visualize_calibration_boards` method after calibration. | ||
| * `Blob detection parameters` for detecting asymmetric and symmetric circular grids can be accessed and modified via the **Camera_Calibration_API's object** prior to calling the `calibrate_camera` method | ||
| * Also has `terminal` support with **minimal control** on the variables. Use it as an importable module for better control over the variables | ||
| * Can also be easily extended to support other unimplemented calibration patterns | ||
|
|
||
| #### Using custom calibration board with the Camera_Calibration_API. | ||
|
|
||
| So you want to extend the API for a custom calibration pattern? Well... OK! Just follow the follow the steps below | ||
|
|
||
| * The `calibrate_camera` accepts two additional arguments called `custom_world_points_function` and `custom_image_points_function`. | ||
| * You must implement the above two custom methods and pass it as an argument to the `calibrate_camera` method | ||
|
|
||
|
|
||
| ##### custom_world_points_function(pattern_rows,pattern_columns): | ||
|
|
||
| * This function is responsible for calculating the 3-D world points of the given custom calibration pattern. | ||
| * Should take in two keyword arguments in the following order: Number of rows in pattern(int), Number of columns in pattern(int) | ||
| * Must return only a single numpy array of shape (M,3) and type np.float32 or np.float64 with M being the number of control points of the custom calibration pattern. The last column of the array (z axis) should be an array of 0 | ||
| * The distance_in_world_units is not multiplied in this case. Hence, account for that inside the function before returning | ||
| * The world points must be ordered in this specific order : row by row, left to right in every row | ||
|
|
||
| ##### custom_image_points_function(img,pattern_rows,pattern_columns): | ||
|
|
||
| * This function is responsible for finding the 2-D image points from the custom calibration image. | ||
| * Should take in 3 keyword arguments in the following order: image(numpy array),Number of rows in pattern(int), Number of columns in pattern(int) | ||
| * This must return 2 variables: return_value, image_points | ||
| * The first one is a boolean Representing whether all the control points in the calibration images are found | ||
| * The second one is a numpy array of shape (N,2) of type np.float32 containing the pixel coordinates or the image points of the control points. where N is the number of control points. | ||
| * This function should return True only if all the control points are detected (M = N) | ||
| * If all the control points are not detected, fillup the 2-D numpy array with 0s entirely and return with bool == False. | ||
| * The custom image points must be ordered in this specific order: : row by row, left to right in every row | ||
|
|
||
| **NOTE: 'Custom' pattern is not supported when accessed from terminal** | ||
|
|
||
|
|
||
|
|
||
| #### Supported Calibration patterns (rows x columns) bydefault: | ||
|
|
||
| ##### Chessboard or Checkerboard pattern (6 x 9): | ||
| 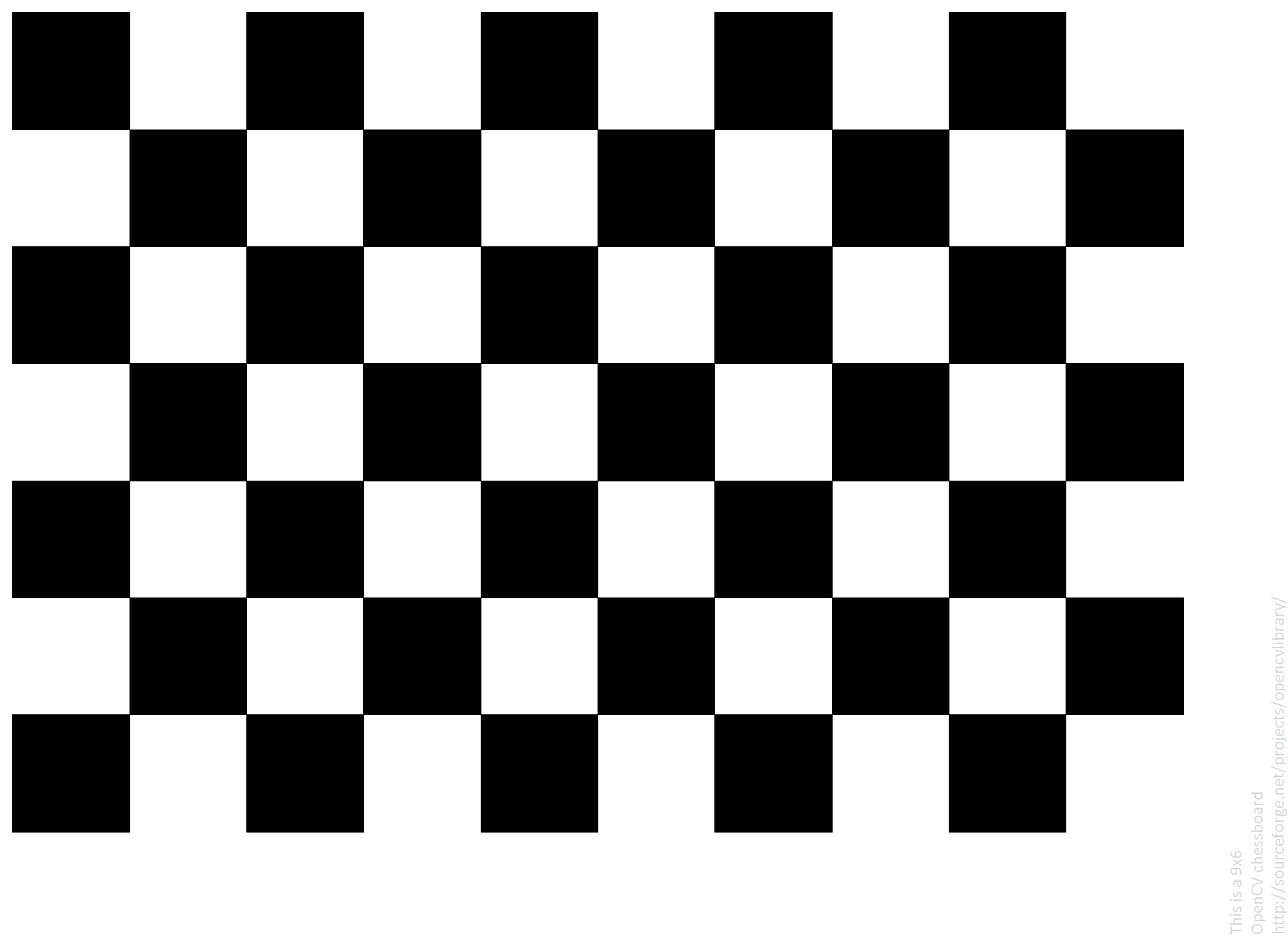 | ||
|
|
||
| ##### Asymmetrical circular grid/pattern (4 x 11): | ||
| 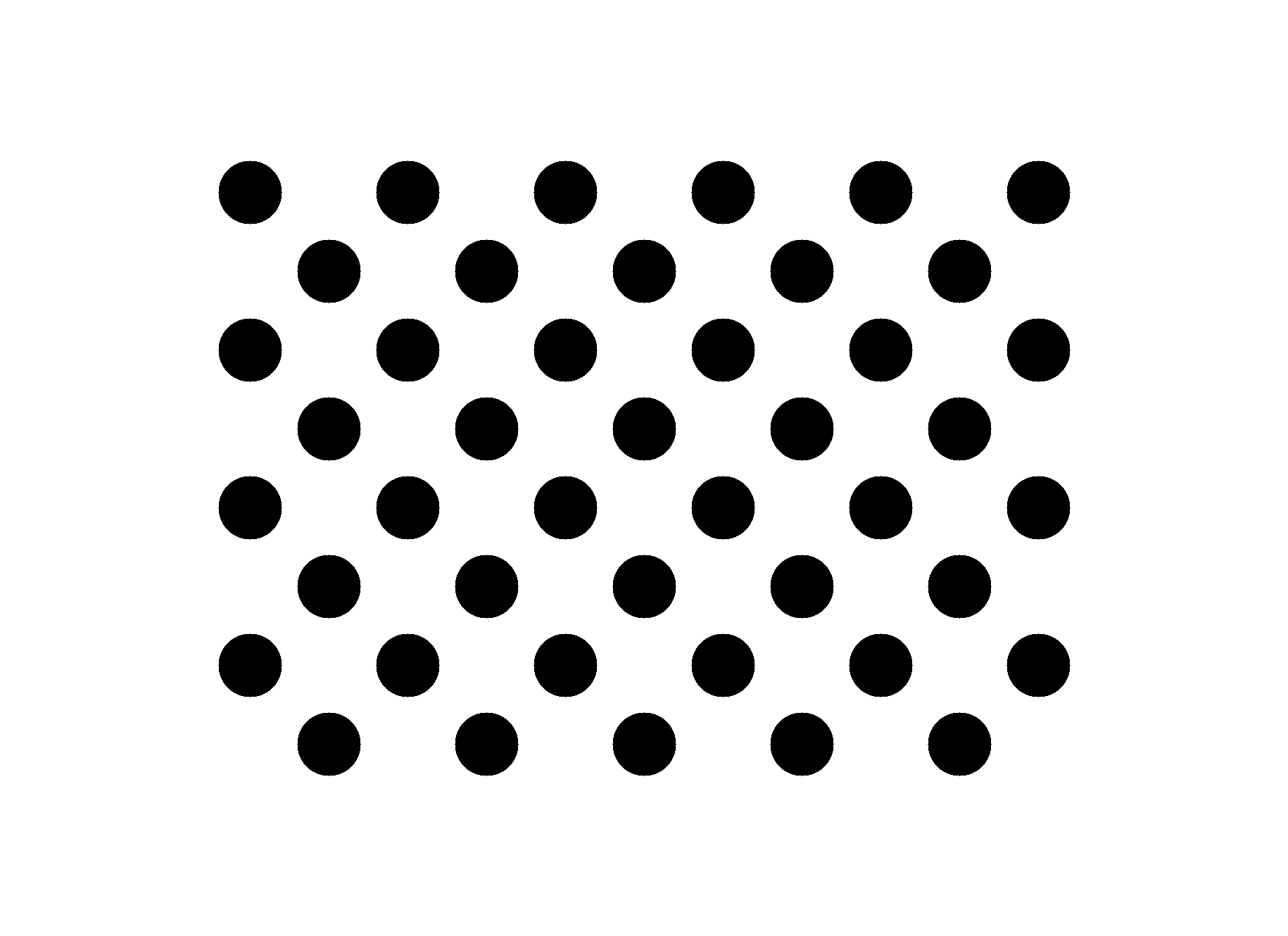. | ||
|
|
||
| #### NOTE for calibrating using Asymmetric circular grid: | ||
| * The code assumes that each asymmetric circle is placed at half the `distance_in_world_units` in both (x,y) from each other. | ||
|
|
||
| * The `distance_in_world_units` is specified as the distance between 2 adjacent circle centers at the **same y coordinate** | ||
|
|
||
| * The above is a **4 x 11 (r x c)** asymmetrical circular grid. | ||
|
|
||
| * If you are using the same orientation as the above, Then this orientation is termed as **double_count_in_column** which is by default set to `True`. | ||
|
|
||
| * If you are using an orientation which is 90deg to the above orientation **11 x 4 (r x c)** then the `double count` is along the **rows**. In this case, set `object.double_count_in_column = False` prior to calling `object.calibrate_camera` method. | ||
|
|
||
| ##### Symmetric circular grid/pattern (7 x 6): | ||
| 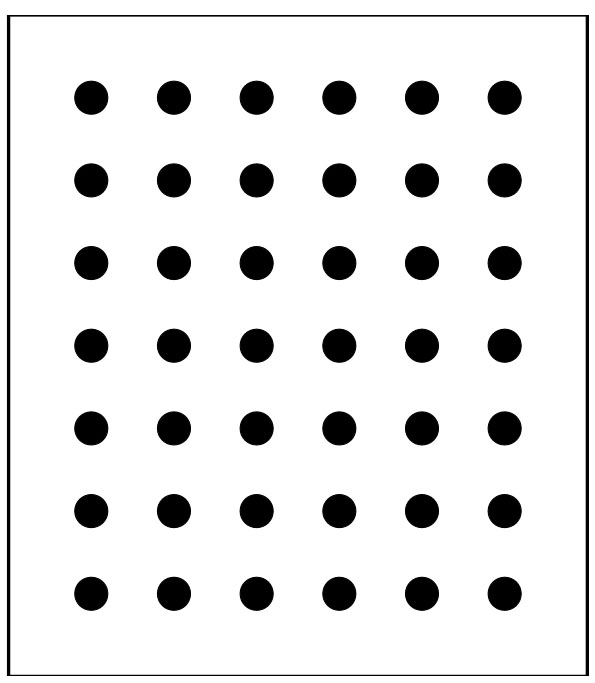 |
Empty file.
Oops, something went wrong.